
I graduated with a PhD from Northwestern University and have joined the computer vision group at MERL, where my research focuses on the core challenges in computer vision and machine learning for robotics autonomy. In my doctoral research, I investigated probabilistic models for human intent recognition and adaptive assistance in shared autonomy for assistive teleoperation under limited and noisy interfaces that typically are available to end users with motor-impairments. My dissertation research also focused on the development of novel perception algorithms involving geometric methods and machine learning for the detection of high level navigation and manipulation goals for shared autonomy. I was affiliated with the Shirley Ryan Abilitylab, Chicago and my research work lead to end-to-end solutions involving user studies and interactive robotic systems to act with people in practical applications.
PublicationsSiddarth Jain and Brenna Argall. Probabilistic Human Intent Recognition for Shared Autonomy in Assistive Robotics. ACM Transactions on Human-Robot Interaction (THRI) 9.1 (2019): 1-23. [ pdf ] Human Intent Recognition | Probabilistic Inference | Adjustable Rationality Model of Human Actions | Shared Autonomy | HRI
Siddarth Jain and Brenna Argall. Recursive Bayesian Human Intent Recognition in Shared-Control Robotics. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018. [ pdf ] [ bib ] Human Intent Recognition | Intent Inference | Adjustable Rationality Model of Human Actions | Shared Autonomy | HRI

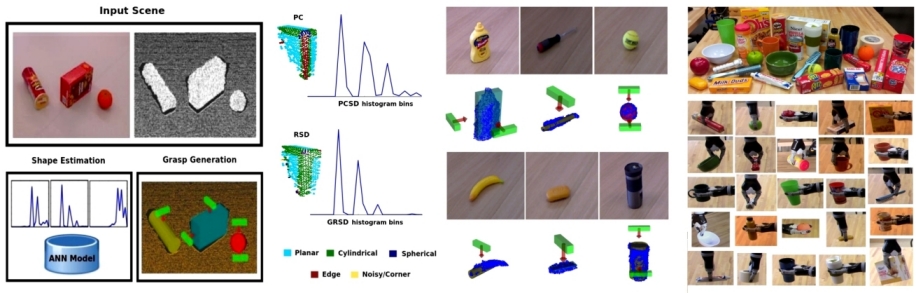
Siddarth Jain and Brenna Argall. Grasp Detection for Assistive Robotic Manipulation. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2016. [ pdf ] [ bib ] Robotic grasps | Grasping | Geometric approach | Shape Primitives | Grasp dataset | Assistive robotic arm | Point Clouds
Siddarth Jain and Brenna Argall. Estimation of Surface Geometries in Point Clouds for the Manipulation of Novel Household Objects. In RSS 2017 Workshop on Spatial-Semantic Representations in Robotics, 2017. [ pdf ] [ bib ] Point Clouds | Local Surface Geometries | Global Surface Descriptors | Grasp Generation and Ranking | Intent Inference
Deepak Gopinath, Siddarth Jain and Brenna Argall. Human-in-the-Loop Optimization of Shared Autonomy in Assistive Robotics. IEEE Robotics and Automation Letters (RA-L) vol. 2, no. 1, pp. 247-254, 2017. [ pdf ] [ bib ] Shared Control | Assistive robotic arm | User-driven customization

Siddarth Jain and Brenna Argall. Robot Learning to Switch Control Modes for Assistive Teleoperation. In RSS 2016 Workshop on Planning for Human-Robot Interaction: Shared Autonomy and Collaborative Robotics, 2016. [ pdf ] [ bib ] Assistive robotic arm | Mode Switching assistance | Low-dimensional interfaces | Machine Learning
Siddarth Jain, Ali Farshchiansadegh, Alexander Broad, Farnaz Abdollahi, Ferdinando Mussa-Ivaldi, Brenna Argall. Assistive Robotic Manipulation through Shared Autonomy and a Body-Machine Interface. In Proceedings of the 14th IEEE/RAS-EMBS International Conference on Rehabilitation Robotics (ICORR), 2015. [ pdf ] [ bib ] Body-Machine interface | Shared Control | Assistive robotic arm | Path Planning | Rehabilitation robotics

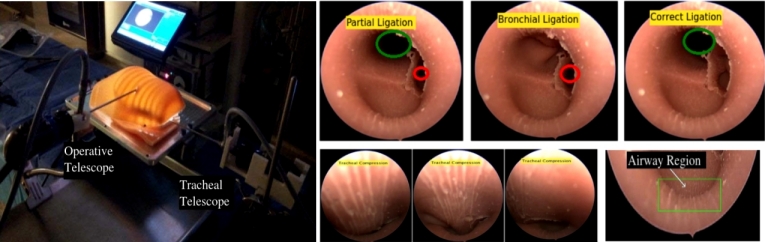
Siddarth Jain, Katherine A Barsness, Brenna Argall. Automated and Objective Assessment of Surgical Training: Detection of Procedural Steps on Videotaped Performances. In Proceedings of the 17th International Conference on Digital Image Computing: Techniques and Applications (DICTA), 2015. [ pdf ] [ bib ] Medical image processing for Surgical assessment | Tracheoesophageal fistula repair | Skill evaluation
Siddarth Jain, Katherine A Barsness, Ellie O'Brien, Brenna D Argall. Towards Validated Surgical Skills Assessment: Automated monitoring of Tracheoesophageal Fistula Repair (oral abstract). In International Pediatric Endosurgery Group 24th Annual Congress for Endosurgery in Children (IPEG), 2015.
Siddarth Jain and Brenna Argall. Automated Perception of Safe Docking Locations with Alignment Information for Assistive Wheelchairs. In Proceedings of the 27th IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2014. [ pdf ] [ bib ] Robot docking | Docking structures | Docking detection | Point Clouds | Computer Vision | Assistive Robotics | Wheelchairs

Teaching
EECS 469 / ME 495: Machine Learning & Artificial Intelligence for Robotics [ course page ] Northwestern University, T.A., Fall 2016 Instructor for four lectures (Bayesian filters, Topics in ML and AI) Evaluated reports, code assignments, projects and final exam papers EECS 495: Machine Learning & Artificial Intelligence for Robotics [ course page ] Northwestern University, T.A., Fall 2014 Instructor for machine learning lecture (Neural Networks and Genetic Algorithms) Evaluated reports, code assignments, projects and final exam papers
Siddarth Jain. © 2019.