HW6: Synthetic
Aperture Imaging (15 points)
Due: Thursday
12/1 at 11:59pm
EECS 395/495: Introduction
to Computational Photography
In
this homework, you will capture a light field by waving your tablet camera around.
The goal of this homework is to synthesize an image that appears to be captured
from a synthetic aperture that is much larger aperture than your tablet
camera [1]. The advantage of this technique is that captured images can have a
significantly smaller depth of field, giving the look and feel of a much more
expensive camera. The other advantage is that, because we are capturing a light
field, we can digitally refocus the image. The disadvantage of this technique
is that, because it relies on sequential image capture, it will only work for
static scenes. The technique requires the image sequence to be registered, and
the quality of the final photograph will be limited by how well the images can
be registered. In this homework, we will use a simple auto-correlation based
registration scheme.
1. Capture an unstructured
light field (3 points)
You
don't need to write any Android code for this homework
assignment. You can use the any Android camera application that records video.
You will capture a video as you wave your camera around in front of a static
scene. Here are some guidelines.
1.
You need to avoid tilting and rotating the camera as much as possible.
You should just shift the camera in a plane (see Figure 1). You may need to try
this several times before you capture a good video.
2.
You may want to press the phone against a flat object to help guide the
planar motion
3.
Experiment with different types of camera motion. You can try moving
the camera in a zig-zag
motion (as in Figure 1). You can also try using circular motion. In general,
the more you cover the plane, the better your results in the next section will
be.
4.
Make sure your video is not too long. You should capture a few seconds
of video.
5.
Capture a scene with a few objects at different depths. See Figure 2
for an example. In the next section you will create narrow synthetic aperture
images that are focused on these objects
6.
Make sure that all of the objects in the scene are in focus. As long as
objects are about a meter in size and 1-2 meters away, they will more or less
be in focus.

Figure 1:
Capture an unstructured light field of a scene by waving a camera in front of a
scene. Make sure the motion is in a plane.
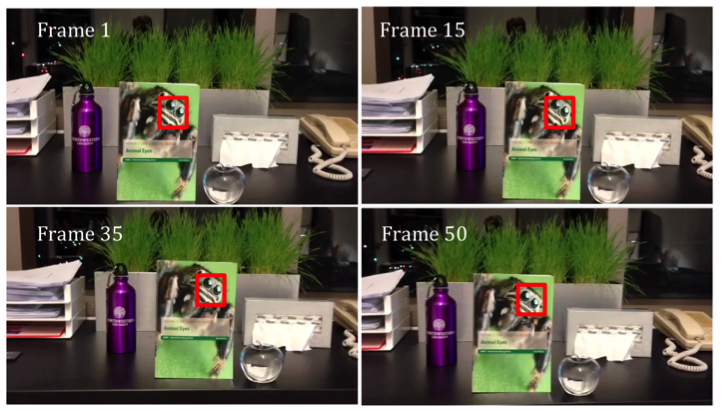
Figure 2: four
images from a video captured using the zig-zag
motion shown in Figure 1. The red box shows the template that is used to
register the video frames in the next part 2 of this homework.
2. Register the frames of
video using template matching (5 points)
Once
you have captured a video, you use Matlab to register
each frame of captured video and generate synthetic aperture photos. Registration should be performed on grayscale video frames. You will use a simple
template-matching scheme as described in the first lecture on image processing.
Here is what you need to do:
1.
Write a matlab program to load in the video.
You can use the built-in Matlab VideoReader
object to read the saved .mp4 file into a Matlab
array (see documentation for details).
2.
Convert each frame of your video to grayscale
3.
You can use all of the frames in the video, but this may make your
processing slow if you captured more than a few seconds of video. You should be
able to get away with selecting 60 or so frames for processing (for instance by
selecting only every few frames).
4.
The red box in Figure 2 shows the template that was used for
registration. You will need to select a similar template from the first frame
of your video. You will then search for a match to this template in successive
frames. The location of the match will tell you how many pixels your camera has
shifted. Choose a size for this template (i.e. 16x16 pixels). You may need to
adjust this to improve your results.
5.
You only need to search for a template match within a window of your
target frame (see Figure 3). The window should be centered on the location of
the template in the first frame. The size of the window should be slightly
larger than the sum of the template size and the maximum shift of the target
object over the entire set of video frames. For instance, in Figure 2 the template
was 60x60 pixels and the maximum shift of the template in Figure 2 was about 40
pixels, and a search window of 200x200 pixels was used.
Frame
15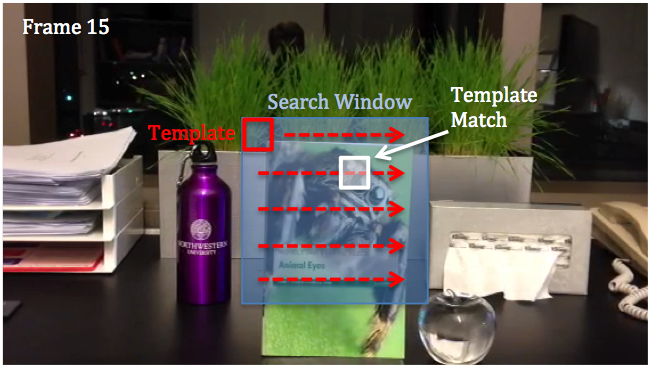
Figure 3: Search within a window of your target frame for a match to
your template. The location of this match tells you the amount of shift of the
camera relative to the first frame of video.
6.
Now, perform an autocorrelation of the template with the extracted
search window. If your template ![]() is
is ![]() pixels and your window
pixels and your window ![]() is
is ![]() pixels, compute the normalized
correlation function
pixels, compute the normalized
correlation function ![]() using the equation:
using the equation:

where ![]() is a block of pixels taken from the
window
is a block of pixels taken from the
window ![]() that is centered on the pixel location
that is centered on the pixel location ![]()
![]()
and the normalization factors are computed as

Note that the normalized factor P is computer over a window the size of
the template (![]() pixels) not over the entire window (
pixels) not over the entire window (![]() pixels)!
pixels)!
HINT: Use the builtin Matlab
function nlfilter to perform the sliding window
operation of Equation 1!
The pixel shift ![]() for each frame of video can then be
computed as:
for each frame of video can then be
computed as:
![]()
Show a plot of the pixel shift for each frame (see Figure 4).
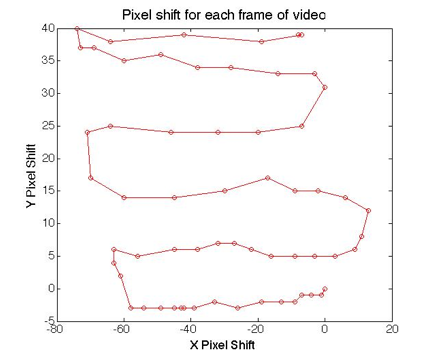
Figure 4: The pixel shifts for the video in Figure 1 found from
Equation 4.
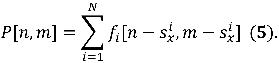
3. Create a synthetic
aperture photograph (5 points)
Once
you have calculated the pixel shift from Equation 4, you can generate a
synthetic aperture photograph simply by shifting the images of each frame of
video in the opposite direction and then summing up the result. If the ![]() is the ith
video frame, and
is the ith
video frame, and ![]() is the shift for that frame, you can
simply calculate your synthetic aperture photograph as
is the shift for that frame, you can
simply calculate your synthetic aperture photograph as
You
may want to use the builtin Matlab
functions maketform
and imtransform
to help you do this. Figures 5 and 6 show synthetic aperture photographs
generated from the video in Figure 1.
4. Refocus on a new object
(2 points)
Now
you will refocus on a new object. To do this you will simply select your
template from the first from of video to be centered on a different object.
Then all you need to do are repeat steps 3 and 4.

Figure 4: The
first frame of video from Figure 1.

Figure 5: A
synthetic aperture photograph using a template from the book in front.
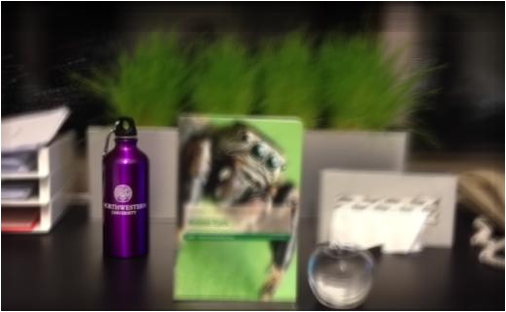
Figure 5: A synthetic
aperture photograph using a template from northwestern water bottle.
Problems you
may run into. You will find that the quality of your synthetic aperture photographs
depends a lot on how you moved the camera while capturing the video. This is because
our registration algorithm does not take into account possible tilt and
rotation of the camera. The more you are able to avoid tilt and rotation, the
better the results will be.
What to Submit:
Submit
a zip file to the dropbox, which includes
1.
A write-up document that explains what you did, what the results are,
and what problems you encountered.
2.
The video you captured and All Matlab code
that you wrote.
3.
The write-up should include all the figures that you were instructed to
generate.
References
[1] Synthetic aperture
confocal imaging, Marc Levoy, Billy Chen, Vaibhav
Vaish, Mark Horowitz, Ian McDowall, and Mark Bolas.
2004. ACM Trans. Graph. 23, 3 (August 2004),
825-834.